原标题:高仙机器人创始人兼CEO程昊天:从机器人底层技术到商用落地的闭环 | CCF-GAIR 2018
雷锋网按:2018 全球人工智能与机器人峰会(CCF-GAIR)在深圳召开,峰会由中国计算机学会(CCF)主办,雷锋网、香港中文大学(深圳)承办,得到了深圳市政府的大力指导,是国内人工智能和机器人学术界、工业界及投资界三大领域的顶级交流盛会,旨在打造国内人工智能领域最具实力的跨界交流合作平台。
6月30日下午,高仙机器人创始人兼CEO程昊天为CCF-GAIR 2018「机器人应用专场」分会场做了主题为「从机器人底层技术到商用落地的闭环」的演讲,雷锋网对其演讲进行了不改变原意的整理。
高仙机器人一直致力于解决不同场景过程中的机器人移动问题,室内、室外,包括电梯、楼宇全场景移动解决方案,目前主要是在安防、楼宇配送、环卫清洁三大领域进行布局。
高仙机器人目前主要有两种商业落地模式,一是为行业客户提供解决方案,二是在室内清洁领域做自主品牌的产品线。通过这两种方式,公司可以更快的实现商业闭环,迅速进行各种商业落地。

在这样的商业落地过程中,技术研发能够促进落地的速度和数量,而速度和数量的提升又可以提供各种数据和场景,帮助团队进行分析和提高,进而反哺技术研发,形成一个良性循环。
高仙机器人成立于2013年,是服务机器人领域的老兵。在这五年里,服务机器人行业发展非常快,一系列场景和商业落地越来越成熟,行业中存活下来的公司都已经逐渐找到自己的细分场景和落地点。
高仙机器人创始人兼CEO程昊天认为,2018年会是一个很特别的年份。随着包括供应链在内的底层技术变得越来越成熟,配套、供应链都逐渐健全,传感器、激光雷达等关键部件的价格都在迅速下降,这个行业今年开始会进入高速的增长阶段,预计未来五到十年会持续每年三到五倍的增长。

服务机器人领域有三块底层技术:一是自主移动,二是机器视觉,三是自然语言理解。这其中,机器视觉、自然语言理解尚属于初期阶段,相比之下自主移动技术则是走在最前面的一块。今天简单聊一下自主移动技术这块未来的发展趋势和现在的现状。
自主移动技术的应用场景主要分为三类:室内低速、室外低速和室外高速,不同场景对应不同的技术难度。在这之下,自主移动技术又分成四个小的应用方向:SLAM本身、感知、路径规划和运动控制。针对不同的场景,每个细分的技术都有不同的难度这些场景和技术综合起来,最终决定了机器人的性能以及能否达到商业应用的条件。
程昊天提到,随着应用的爆发,商业应用对于机器人的要求也越来越高,更多应用开始要求室内外通用的解决方案,全场景移动能力在整个行业里变得至关重要。为此,高仙机器人率先提出了SLAM2.0的概念。

SLAM2.0与传统SLAM最大的区别在于语义。与通过雷达或视觉寻找特征点和物体表面轮廓来定位坐标的点云SLAM相比,SLAM2.0引入了视觉、模式识别和感知,可以对物体进行识别。通过语义SLAM,机器人可以对物体进行具体的识别,根据物体的位置去定位自己的朝向和最终的目标点,并针对不同的物体精确执行不同的动作。
此外,大家一直对SLAM应当以激光雷达为主还是以视觉为主的问题颇有争论。高仙机器人认为,随着任务或是场景复杂性越来越高,尤其是在全场景移动的需求上,单个传感器的局限会越来越大:视觉的信息量大但精度差,激光雷达的精度高但信息量少。它们两个是非常好的互补关系,SLAM在未来三到五年的发展方向一定是多传感器融合。
程昊天表示,高仙机器人通过多传感器融合,可以实现以往单一激光雷达无法实现的功能,如检测停车桩、地面水渍等。

除了SLAM技术,机器人的运动控制和移动能力同样非常重要。随着机器人的体积越来越大,外形从圆盘形为主逐渐演化出各种形态,机器人对于运动控制的需求也从二维增长到三维,自由度更高的洗地机和物流车甚至需要四维运动控制系统。
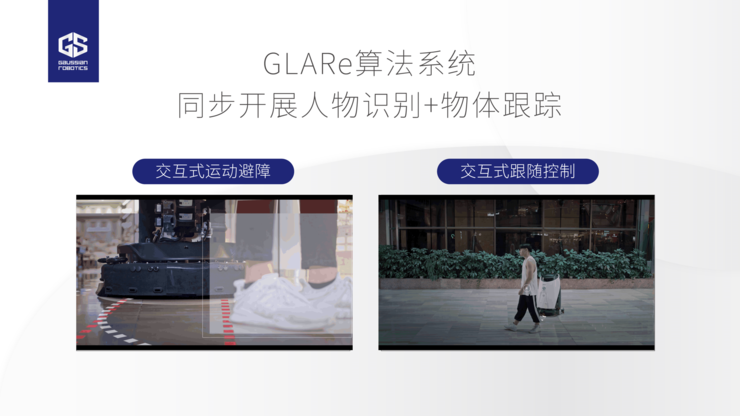
而相应的,路径规划以及复杂场景中的避障也是非常重要的核心能力和发展方向,包括迎人、跟随等算法都是未来自主移动技术必备的条件。
最后,程昊天还向大家介绍了高仙机器人在促进市场上下游产业链打通上所做的努力。高仙机器人可以为行业客户提供配送、安防等各种解决方案,包括SLAM、外壳机械结构、底盘机械结构以及服务清单等都会提供给客户,可以为客户节省大量的研发时间和费用,让客户把更多时间和资金投入到应用端和市场端。
以酒店行业为例,高仙机器人与深圳的安泽智能在碧桂园项目上提供整套解决方案,三个月左右便可以落地配送产品,与之类似的还有安防等行业。
程昊天表示,高仙机器人通过这种方式,在某种程度上对整个服务机器人行业做出了实实在在的贡献,能够让更多公司进入这个行业,并且让技术越来越成熟,以推动行业更快的发展。